


Hoje vamos falar de um assunto
muito importante dentro da mecânica e da mecatrônica: os elementos de máquinas.
Neste artigo, especificamente, vamos tratar dos fusos, apresentando algumas
características interessantes e aplicações. Ainda, vamos demonstrar algumas
formas de calcular o movimento provocado por um fuso e apresentar uma montagem
de teste.
Fiz a montagem abaixo que expõe o avanço de um fuso de 2mm e outro de 8mm. Esse fusos TR8
que estou utilizando são comumente utilizados em pequenos Routers e impressoras
3D. Lembrando que, dominando alguns conceitos que
vamos trabalhar aqui, você será capaz de projetar vários tipos de máquinas.

Recursos utilizados

- Fuso trapezoidal de 8mm de
diâmetro e 2mm de passo
- Fuso trapezoidal de 8mm de
diâmetro e 8mm de passo
- Castanha flangeada para fuso
8x2
- Castanha flangeada para fuso
8x8
- Mancais para fusos de 8mm de
diâmetro
- Guia linear cilíndrica 10mm de
diâmetro
- Rolamentos cilíndricos para guias 10mm
- Suportes para guias
cilíndricas de 10mm
- Motores NEMA 17
- Acopladores de eixo
- Arduino Uno
- Driver DRV8825
- Teclado matricial 4x4
- Display Nokia 5110
- Peças plásticas diversas
- Parafusos e porcas
- Base de madeira
- Fonte externa de alimentação
12V
Sobre fusos – O que são?

Os fusos são elementos de
máquinas, como os parafusos. Ou seja, são barras retas formadas por roscas de
passos contínuos. São utilizados em mecanismos que exigem movimento linear e
posicionamento. Podem exercer altas forças de tração e compressão e transmitem
torque.
Permitem movimentação com travamento automático. Podem ser construídos
de diversos materiais, sendo os mais comuns alumínio e aço.
Como empresas chinesas estão
fabricando os fusos trapezoidais, eu indico que você adquira este tipo de
produto ao invés do conhecido parafuso de porca. Isso em função do preço mais
atrativo e do arrasto, que considero medonho.
Na foto coloco o melhor fuso
que existe, na minha opinião, que é o fuso de esfera recirculante. Ele geralmente
é feito de um aço bem duro, sendo que as esferas giram em seu entorno, isso
dentro da castanha. Além da precisão que ótima, também destaco a durabilidade,
já que esse tipo de fuso consegue reproduzir bilhões de movimentos sem estragar
o mecanismo. Uma opção mais barata, que é a que usamos aqui, é o fuso
trapezoidal.
Sobre fusos – Roscas simples e de esferas

Os fusos de esferas, na foto à
esquerda, possuem canais semicirculares onde as esferas rolam. São
relativamente mais caros e possuem baixa fricção se comparados ao fusos de
rosca simples, levando a um rendimento muito superior (atrito de rolamento).
Já os fusos de roscas simples,
no lado direito da imagem, possuem
normalmente perfis trapezoidais, por ser esta geometria ser mais adequada a
aplicação de forças no sentido axial e transmissão suave de movimento. São
relativamente baratos e possuem alta fricção se comparados aos fusos de esferas
recirculantes, levando a um baixo rendimento devido ao atrito de escorregamento.
Sobre fusos – Aplicações
Os fusos podem ser aplicados
em qualquer mecanismo onde haja a necessidade de movimento linear. São
amplamente utilizados na indústria em maquinário e processos.

Algumas aplicações incluem:
- Elevadores de carga
- Prensas
- Fresas e tornos
- Equipamentos CNC
- Embaladoras
- Impressoras 3D
- Equipamentos de corte e
gravação a laser
- Processos industriais
- Sistemas de posicionamento e
movimentação linear
Sobre fusos – Parâmetros
 Existem diversas
características de um fuso que devem ser levadas em consideração ao se projetar
um mecanismo. Além do seu diâmetro e passo, é necessário reconhecer sua
resistência a compressão, seu momento de inércia (resistência a alteração de
seu estado de rotação), material construtivo, a velocidade de rotação a qual
será submetido, direção de operação (horizontal ou vertical), a carga aplicada,
entre outras.
Existem diversas
características de um fuso que devem ser levadas em consideração ao se projetar
um mecanismo. Além do seu diâmetro e passo, é necessário reconhecer sua
resistência a compressão, seu momento de inércia (resistência a alteração de
seu estado de rotação), material construtivo, a velocidade de rotação a qual
será submetido, direção de operação (horizontal ou vertical), a carga aplicada,
entre outras.
Mas, baseando-se em mecanismos
já construídos, podemos intuir vários destes parâmetros.
Vamos reconhecer alguns bem
comuns. Comecemos pelo PASSO.
Sobre fusos – Passo (deslocamento e velocidade)
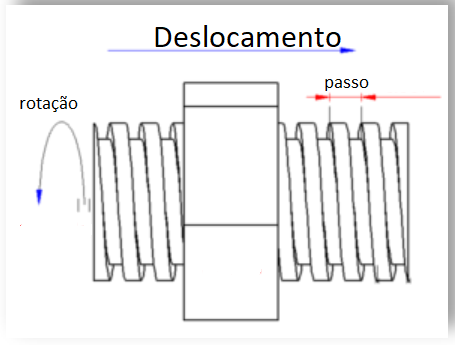
Determina o comprimento
percorrido pela castanha a cada revolução, sendo medido normalmente em
mm/revolução.
Um fuso de 2mm por revolução
provocará um deslocamento de 2mm a cada volta que o fuso executar. Influenciará
na velocidade linear da castanha, uma vez que, com o aumento da velocidade de
rotação, o número de revoluções por unidade de tempo aumentará e
consequentemente a distância percorrida também.
Se um fuso de 2mm por
revolução girar a 60 RPM (uma volta por segundo), a castanha se movimentará a
2mm por segundo.
Montagem

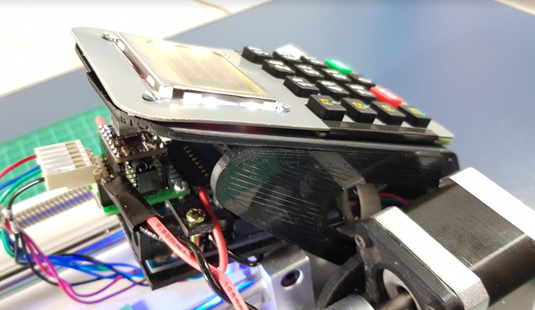
Na nossa montagem, tenho dois
motores e nosso teclado com o display, que ficou parecendo uma calculadora,
pois eu fiz uma capa para eles na impressora 3D. No display da Nokia temos as
seguintes opções:
F1: Crescente – Fuso vai da
posição atual para a posição que eu determinar
F2: Decrescente – Volta
F3: Velocidade – Posso alterar
a largura de pulso
F4: ESC
Montagem – Materiais

A - Guias lineares de 10mm
B - Fusos trapezoidais de
passos 2 e 8mm
C - Base com furação
D - Mancais para os fusos
E - Suportes das guias
F - Castanhas dos fusos
G - Rolamentos
H - Acopladores
I - Motores
J - Peças de plásticos
diversas (cursores, suportes dos motores, calços, suporte de teclado e display)
Montagem - Passo 01
Seguindo a furação da base
(C), montamos os dois motores (I). Para prendê-los, usamos suportes feitos na
impressora 3D (J). Não apertamos nenhum dos parafusos nesta etapa de
posicionamento. Isso permitirá os ajustes necessários na etapa de alinhamento.

Montagem - Passo 02
Ainda seguindo a furação da
base (C), posicionamos os suportes das guias (E) e os mancais (D). Detalhe para
o calço plástico (J) utilizado para ajustar as alturas dos mancais.

Montagem - Passo 03
Criamos um cursor usando uma
peça impressa para conectar o rolamento (G) à castanha (F). Usamos dois
cursores, um direito outro esquerdo. Sua função é indicar a posição em uma
escala sempre que quisermos determinar o deslocamento causado pelo fuso.

Montagem - Passo 04
Inserimos a guia (A) e o fuso
(B) nos seus respectivos mancal (D) e suporte (E), pelo lado oposto ao motor,
em seguida, inserimos a guia e o fuso no rolamento (G) e castanha (F) e na
ponta do fuso inserimos também o acoplador (H). Levamos os dois até atingirem
seus pontos finais (suporte oposto e motor).
Apertamos levemente os
parafusos para permitir um posterior ajuste. Repetimos o procedimento usando a
guia e fuso restantes. Com todos os componentes posicionados, efetuamos o
alinhamento das partes, finalizando a etapa de montagem mecânica.


Montagem - Eletrônica
Usando um suporte plástico
impresso, fixamos o display Nokia 5110 e um teclado matricial 4x4. No espaço
inferior do suporte residirá o Arduino Uno, o driver DRV8825.


Usando a furação disponível na
base, prendemos o conjunto.

Esquema elétrico
O esquema elétrico é simples.
Temos o DRV8825 e os dois mesma 17 espelhados, ou seja, o mesmo passo que mando
para um vai para o outro. O que muda é que em um dos motores eu tenho um fuso
de 8mm e no outro um fuso de 2mm. Obvio, então, que o primeiro, com fuso de
8mm, vai mais rápido. Ainda constam no esquema o display e o teclado 4x4, que
tem que ser matricial.

Código fonte
Inclusão de bibliotecas e criação de objetos
Temos aqui uma Lib que eu que
fiz, que é a StepDriver.h. Ela está preparada para os drivers 8825, 4988 e
também para o TB6600. Crio neste etapa o objeto DRV8825, o d1.
//Biblioteca responsável por capturar a tecla que foi pressionada no teclado #include <Keypad.h> //Biblioteca responsável pelos graficos do display #include <Adafruit_GFX.h> //Biblioteca responsável pela comunicacao do display #include <Adafruit_PCD8544.h> //Configuracao de pinos do Display // pin 6 - Serial clock out (SCLK) // pin 5 - Serial data out (DIN) // pin 4 - Data/Command select (D/C) // pin 3 - LCD chip select (CS/CE) // pin 2 - LCD reset (RST) Adafruit_PCD8544 display = Adafruit_PCD8544(6, 5, 4, 3, 2); //Biblioteca de motor de passo #include <StepDriver.h> //Instancia o driver DRV8825 DRV8825 d1;
Constantes e variáveis globais
Nesta parte do código trato da
matriz, que já ensinei em outra videoaula (Assista aqui!). Ainda, falo do objeto
Keypad, além da distância e da velocidade.
const byte LINHAS = 4; //número de linhas do teclado
const byte COLUNAS = 4; //número de colunas do teclado
//define uma matriz com os símbolos que deseja ser lido do teclado
char SIMBOLOS[LINHAS][COLUNAS] = {
{'A', '1', '2', '3'},
{'B', '4', '5', '6'},
{'C', '7', '8', '9'},
{'D', 'c', '0', 'e'}
};
byte PINOS_LINHA[LINHAS] = {A2, A3, A4, A5}; //pinos que indicam as linhas do teclado
byte PINOS_COLUNA[COLUNAS] = {0, 1, A0, A1}; //pinos que indicam as colunas do teclado
//instancia de Keypad, responsável por capturar a tecla pressionada
Keypad customKeypad = Keypad( makeKeymap(SIMBOLOS), PINOS_LINHA, PINOS_COLUNA, LINHAS, COLUNAS);
//variáveis resposnsáveis por armazenar o valor digitado
char customKey;
unsigned long distancia = 0;
unsigned long velocidade = 2000;
Função de leitura do teclado
Nesta etapa temos o código
referente ao display, que trabalha a impressão crescente e decrescente.
//Funcao responsavel por ler o valor do usuario pelo teclado-----------------------------------------
unsigned long lerValor() {
//Escreve o submenu que coleta os valores no display
display.clearDisplay();
display.fillRect(0, 0, 84, 11, 2);
display.setCursor(27, 2);
display.setTextColor(WHITE);
display.print("VALOR");
display.setTextColor(BLACK);
display.fillRect(0, 24, 21, 11, 2);
display.setCursor(2, 26);
display.setTextColor(WHITE);
display.print("CLR");
display.setTextColor(BLACK);
display.setCursor(23, 26);
display.print("LIMPAR");
display.fillRect(0, 36, 21, 11, 2);
display.setCursor(5, 38);
display.setTextColor(WHITE);
display.print("F4");
display.setTextColor(BLACK);
display.setCursor(23, 38);
display.print("VOLTAR");
display.setCursor(2, 14);
display.display();
String valor = "";
char tecla = false;
looping aguardando tecla pressionada
Aqui expomos a programação do
Loop, ou seja, onde você digita os valores.
//Loop infinito enquanto nao chamar o return
while (1) {
tecla = customKeypad.getKey();
if (tecla) {
switch (tecla) {
//Se teclas de 0 a 9 forem pressionadas
case '1':
case '2':
case '3':
case '4':
case '5':
case '6':
case '7':
case '8':
case '9':
case '0':
valor += tecla;
display.print(tecla);
display.display();
break;
//Se tecla CLR foi pressionada
case 'c':
//Limpa a string valor
valor = "";
//Apaga o valor do display
display.fillRect(2, 14, 84, 8, 0);
display.setCursor(2, 14);
display.display();
break;
//Se tecla ENT foi pressionada
case 'e':
//Retorna o valor
return valor.toInt();
break;
//Se tecla F4 (ESC) foi pressionada
case 'D':
return -1;
default:
break;
}
}
//Limpa o char tecla
tecla = false;
}
}
Função de movimentação do motor
A função “mover” é trabalhada
nesta etapa. Pego a quantidade de pulsos e a direção e, depois, faço um “for”.
//Funcao responsavel por mover o motor--------------------------------------
void mover(unsigned long pulsos, bool direcao) {
for (unsigned long i = 0; i < pulsos; i++) {
d1.motorMove(direcao);
}
}
setup()
Agora faço a movimentação do
display e a configuração do driver, sendo que eu coloquei inclusive a pinagem
dentro do código fonte para facilitar. Inicializo certos valores e trato dos
métodos que geram as configurações.
void setup() {
//Configuracao do display ------------------------------------------------
display.begin();
display.setContrast(50);
display.clearDisplay();
display.setTextSize(1);
display.setTextColor(BLACK);
//Configuração do Driver DRV8825 -----------------------------------------
// pin GND - Enable (ENA)
// pin 13 - M0
// pin 12 - M1
// pin 11 - M2
// pin 10 - Reset (RST)
// pin 9 - Sleep (SLP)
// pin 8 - Step (STP)
// pin 7 - Direction (DIR)
d1.pinConfig(99, 13, 12, 11, 10, 9, 8, 7);
d1.sleep(LOW);
d1.reset();
d1.stepPerMm(100);
d1.stepPerRound(200);
d1.stepConfig(1);
d1.motionConfig(50, velocidade, 5000);
}
loop() – 1ª parte – Desenhando menu
void loop() {
//Escreve o Menu do Programa no display -----------------------------------
display.clearDisplay();
display.fillRect(0, 0, 15, 11, 2);
display.setCursor(2, 2);
display.setTextColor(WHITE);
display.print("F1");
display.setTextColor(BLACK);
display.setCursor(17, 2);
display.print("CRESCENTE");
display.fillRect(0, 12, 15, 11, 2);
display.setCursor(2, 14);
display.setTextColor(WHITE);
display.print("F2");
display.setTextColor(BLACK);
display.setCursor(17, 14);
display.print("DECRESCENTE");
display.fillRect(0, 24, 15, 11, 2);
display.setCursor(2, 26);
display.setTextColor(WHITE);
display.print("F3");
display.setTextColor(BLACK);
display.setCursor(17, 26);
display.print("VELOCIDADE");
loop() – 2ª parte – Desenhando menu
display.fillRect(0, 36, 15, 11, 2);
display.setCursor(2, 38);
display.setTextColor(WHITE);
display.print("F4");
display.setTextColor(BLACK);
display.setCursor(17, 38);
display.print("ESC");
display.display();
bool esc = false;
loop() – 3ª parte – Executando
//Loop enquanto a tecla F4 (ESC) nao for pressionada
while (!esc) {
//captura a tecla pressionada do teclado
customKey = customKeypad.getKey();
//caso alguma tecla foi pressionada
if (customKey) {
//Trata a tecla apertada
switch (customKey)
{
//Se tecla F1 foi pressionada
case 'A':
distancia = lerValor();
//Se tecla ESC foi pressionada
if (distancia == -1) {
esc = true;
} else {
//Escreve a tela "Movendo" no display
display.clearDisplay();
display.fillRect(0, 0, 84, 11, 2);
display.setCursor(21, 2);
display.setTextColor(WHITE);
display.print("MOVENDO");
display.setTextColor(BLACK);
display.setCursor(2, 14);
display.print(distancia);
display.print(" Passos");
display.display();
loop() – 4ª parte – Executando
//Move o motor
mover(distancia, LOW);
//Volta ao menu
esc = true;
}
break;
//Se tecla F2 foi pressionada
case 'B':
distancia = lerValor();
//Se tecla ESC foi pressionada
if (distancia == -1) {
esc = true;
} else {
//Escreve a tela "Movendo" no display
display.clearDisplay();
display.fillRect(0, 0, 84, 11, 2);
display.setCursor(21, 2);
display.setTextColor(WHITE);
display.print("MOVENDO");
display.setTextColor(BLACK);
display.setCursor(2, 14);
display.print(distancia);
display.print(" Passos");
display.display();
loop() – 5ª parte – Executando
//Move o motor
mover(distancia, HIGH);
//Volta ao menu
esc = true;
}
break;
//Se tecla F3 foi pressionada
case 'C':
velocidade = lerValor();
if (velocidade == -1) {
esc = true;
} else {
//Escreve a tela "Velocidade" no display
display.clearDisplay();
display.fillRect(0, 0, 84, 11, 2);
display.setCursor(12, 2);
display.setTextColor(WHITE);
display.print("VELOCIDADE");
display.setTextColor(BLACK);
display.setCursor(2, 14);
display.print(velocidade);
display.print(char(229));
display.print("s");
loop() – 6ª parte – Executando
display.fillRect(31, 24, 21, 11, 2);
display.setCursor(33, 26);
display.setTextColor(WHITE);
display.println("OK!");
display.setTextColor(BLACK);
display.display();
//Configura nova velocidade ao motor
d1.motionConfig(50, velocidade, 5000);
delay(2000);
//Volta ao menu
esc = true;
}
break;
//Se tecla F4 (ESC) foi pressionada
case 'D':
//Se tecla CLR foi pressionada
case 'c':
//Se tecla ENT foi pressionada
case 'e':
//Volta ao menu
esc = true;
default:
break;
}
}
//Limpa o char customKey
customKey = false;
}
}
Sobre fusos – Configurações em máquinas

Em máquinas CNC como impressoras
3D e routers por exemplo, o programa responsável pelo controle do
posicionamento precisa saber como os movimentos ocorrerão em função do número
de pulsos dados ao motor de passo.
Se o driver do motor de passo
permitir a aplicação de micro-passos, essa configuração deve ser levada em
consideração no cálculo do deslocamento produzido.
Por exemplo: se um motor de
200 passos por revolução, estiver ligado a um driver configurado para 1/16,
então serão necessários 16 x 200 pulsos para uma única revolução do fuso, ou
seja, 3200 pulsos para cada revolução. Se este fuso tiver passo de 2mm por
revolução, serão necessários 3200 pulsos no driver para que a castanha se mova
2mm.
De fato, os softwares
controladores costumam usar um razão para especificar esta relação, o “número
de pulsos por milímetro” ou “steps/mm”.
Marlin
No Marlin, por exemplo, vemos
na seção @section motion:

Neste exemplo, podemos
concluir que os eixos X e Y precisam de 80 pulsos para se deslocar 1mm,
enquanto que o Z precisa de 3200 pulsos e o extrusor E0 precisa de 100.
GRBL
Abaixo vemos os comandos de
configuração do GRBL. Com o comando $100, podemos ajustar o número de pulsos
necessários para provocar um deslocamento de um milímetro no eixo X.

Os eixos Y e Z podem ser
configurados respectivamente o $101 e $102.
Faça o download dos arquivos








11 Comentários
Fernando, não encontrei o download da lib StepDriver.h
ResponderExcluirAbraço!
Olá, Luis Carlos. Obrigado pelo toque. Inserimos o link de download ao fim do artigo, ok!
ExcluirAbraço
Boa noite, tudo bom tenho um projeto de tcc um elevador, e gostaria de saber se você poderia me orientar em algumas coisas esse é o meu conta de WhatsApp 19995038805
ResponderExcluirBoa Boa tarde, gostei muito do projeto.
ResponderExcluirSou iniciante e gostaria de saber se posso comprar esses fusos por metro ou ele tem medidas padrão?
Olá Fernando. Ja saiu o video sobre a lib Stepdriver.h?
ResponderExcluirAbraços e sucesso
Puxa quantos kg?
ResponderExcluirBom dia, Fernando estou com problema na minha router quando corto mdf de 15mm e tenho que passar duas ou três vezes fica um efeito de escada... poderia me dar uma dica...
ResponderExcluirMeu email. lipemelick@hotmail.com meu nome e Felipe
Bom dia Fernando, Não encontrei a biblioteca que vc criou StepMotor.h
ResponderExcluirEu tenho uma dúvida, provavelmente de iniciante.
ResponderExcluirQuando giro meu fuso com o motor a castanha não avança, ela fica no mesmo lugar, apesar de estar bem justa. o que pode ser?
Prezado Sr. Fernando infelizmente não consigo baixar os arquivos, mas agradeceria caso puder me enviar.
ResponderExcluirVi o seu artigo ontem e achei super interessante.
Já me inscrevi em seu canal e também entrei no grupo no Telegram.
Acho as suas matérias excelentes.
Depois 10 anos estou realizando o meu sonho que é construir uma CNC (Mini Router).
Hoje eu até poderia compra uma pronta, mas não teria o mesmo sentimento em construir uma CNC que á tantos anos era o meu sonho.
A você e mais alguns outros tenho agradeço imensamente, pois foram fundamentais nessa minha empreitada.
A minha CNC já está na reta final, que é instalação elétrica, configuração e depois a finalização da parte estética.
Um grande a você e todos de sua equipe.
boa tarde , saberia me dizer se tem como medir e colocar parâmetros de torque em um atuador linear> necessito que ele fique ajustável entre 5 e 15 libras.
ResponderExcluir